下面进入正题: 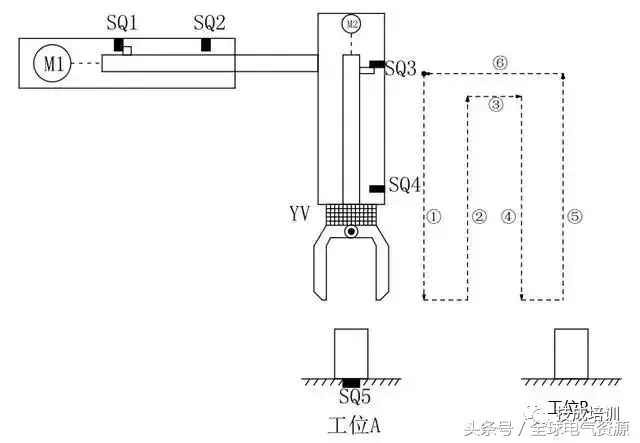 如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。 控制要求如下: 1.机械手要将工件从工位A移到工位B处; 2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合; 3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。 如下图所示: 编程前理顺动作如何转移: 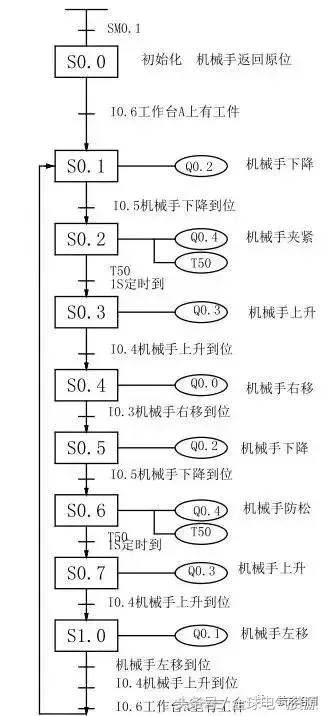 定义符号表:  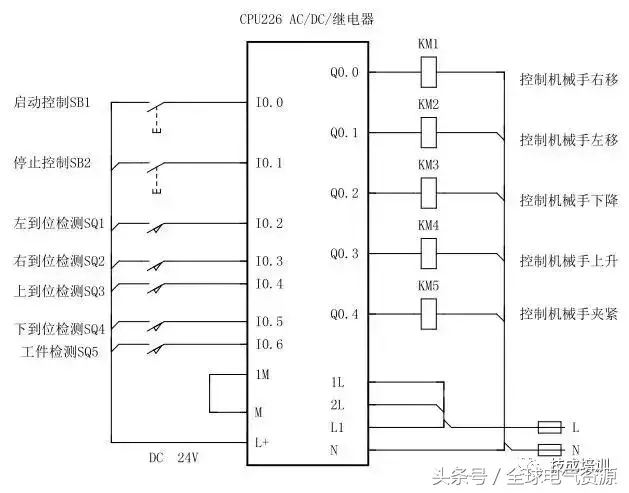 满足所有动作的程序如下:  下面我们一段一段分析这个机械手是如何工作的: 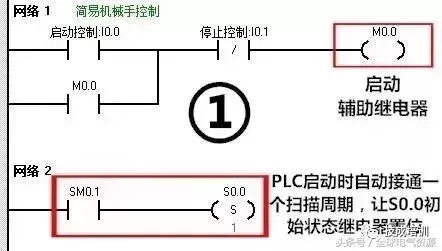 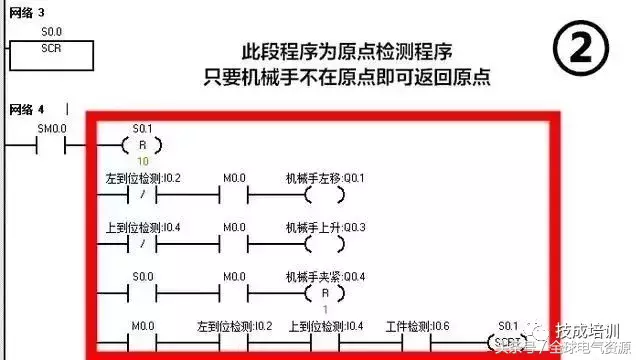 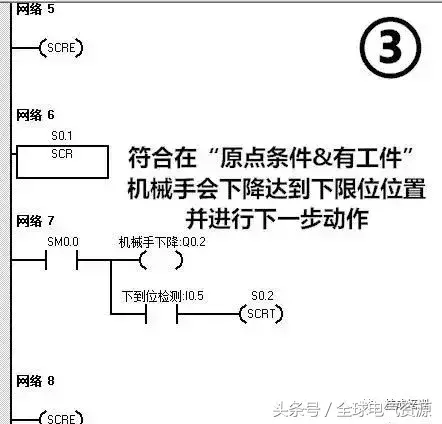 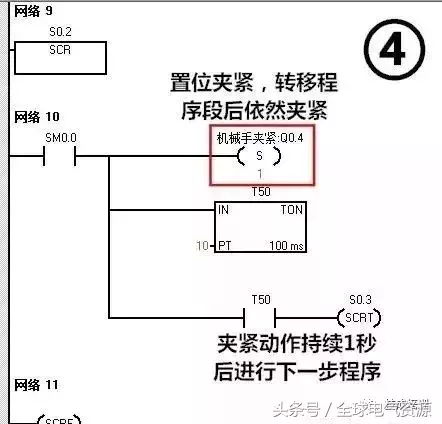 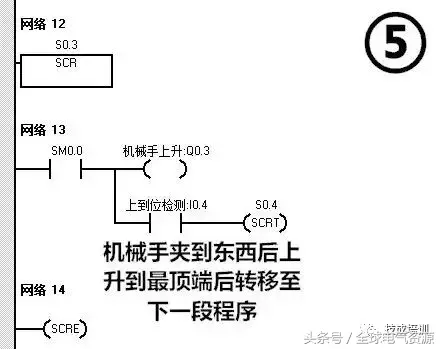 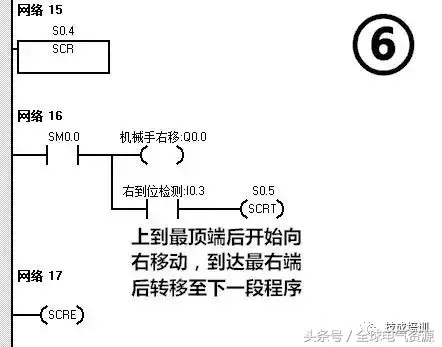 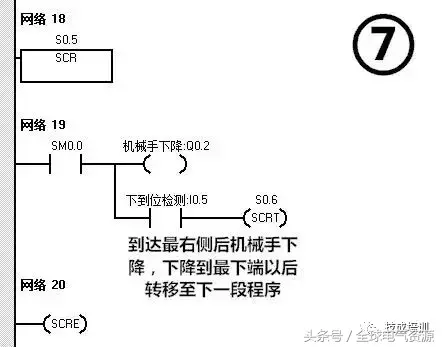 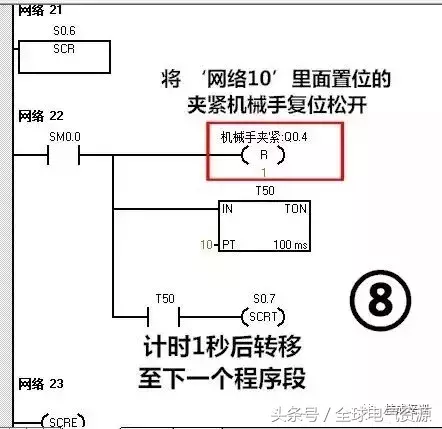 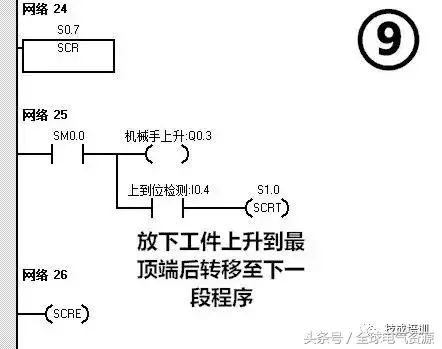 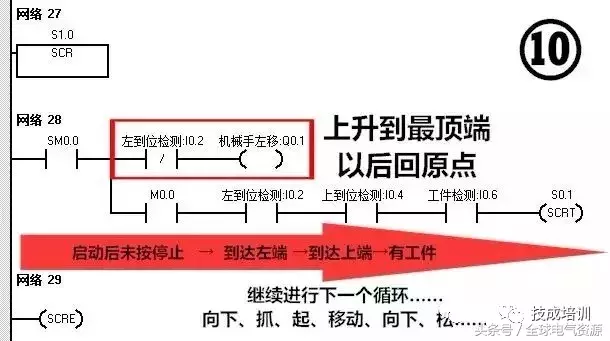 |
 |免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 || 沪公网安备 31010602005455号 )|网站地图
|免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 || 沪公网安备 31010602005455号 )|网站地图
GMT+8, 2021-3-20 21:50 , Processed in 0.048379 second(s), 44 queries .
Powered by Discuz! X3.4
© 2001-2017 Comsenz Inc.





