工业机器人应用范围非常广阔,主要用在装配、搬运、码垛、焊接、点焊、涂胶、喷涂等各领域。本文主要通过ADAMS对四自由度机器人进行运动学仿真,并且查看其对应的后处理结果。 1.仿真流程 1-1 前处理 1-1-1 几何模型构建 1-1-2 材料定义 1-1-3 动力系统模型构建 1-2 求解 1-2-1 驱动条件 1-2-2 求解设置 1-3 后处理 1-3-1 仿真动画 1-3-2 查看结果 1-3-3 评估结果 2.前处理 2.1几何模型的构建 打开ADAMS View,新建一个文件,并且定义好路径和命名,导入如图1所示的几何模型。 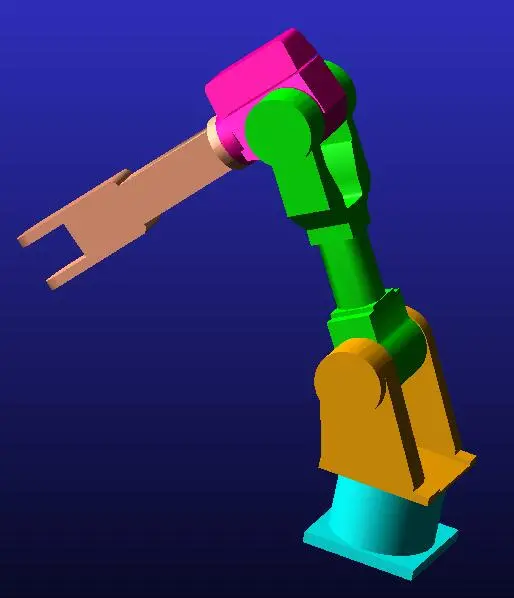 图1 模型导入 2.2材料定义 材料采用默认的结构钢,不需要重新进行定义。 2.3动力学系统模型构建 创建机器人各个关节之间连接关系,如图2所示。 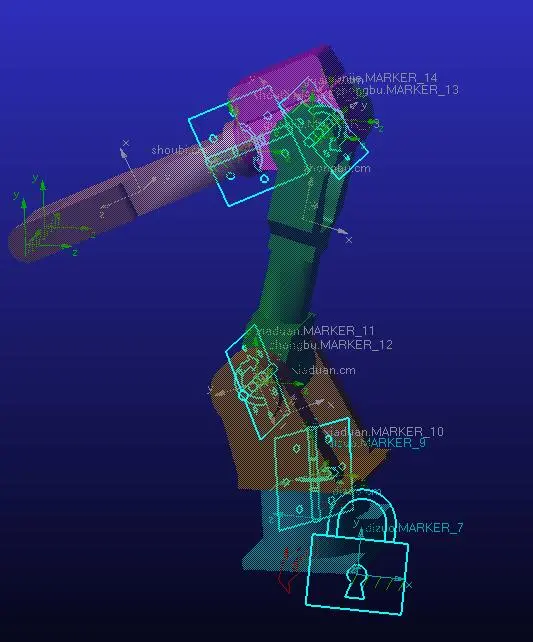 图2 创建连接关系 3.求解 3.1驱动条件 对机器人的各个关节施加相对应的驱动,如图3所示,并且对不同关节施加不同的驱动函数,分别如图4、图5、图6、图7所示。 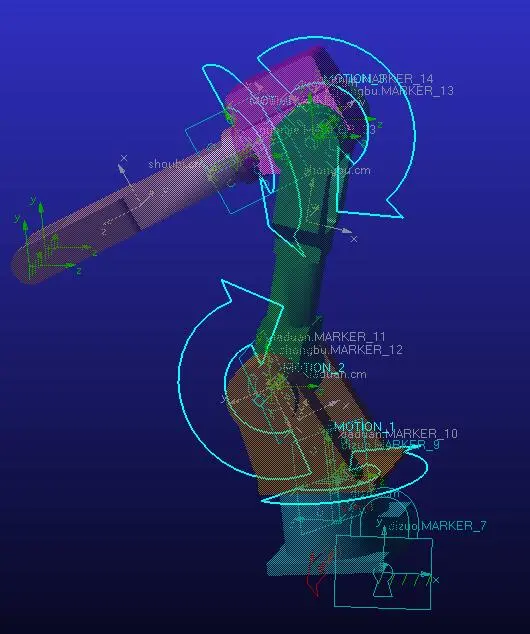 图3 施加驱动 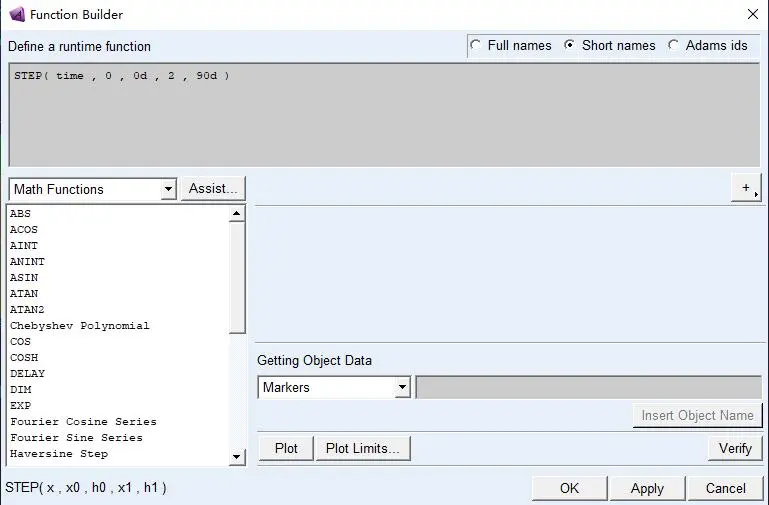 图4关节1驱动函数 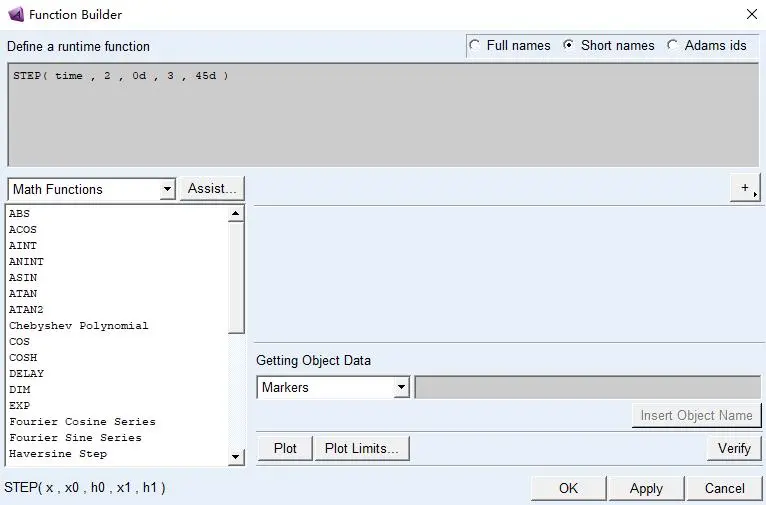 图5 关节2驱动函数 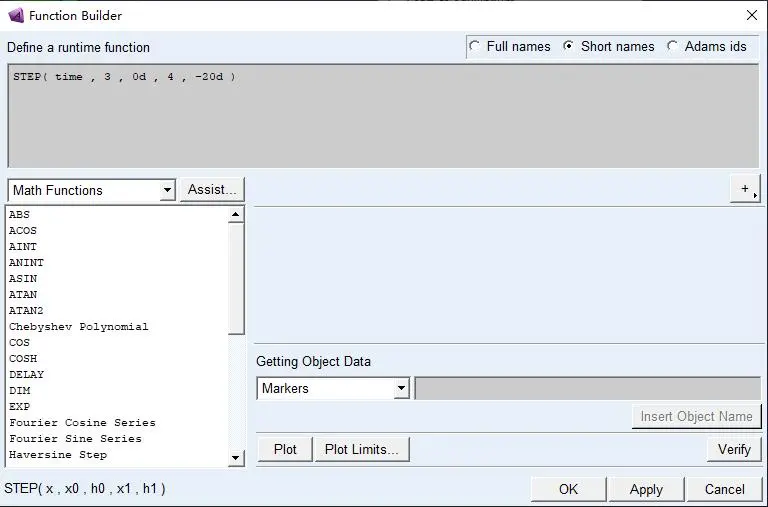 图6 关节3驱动函数 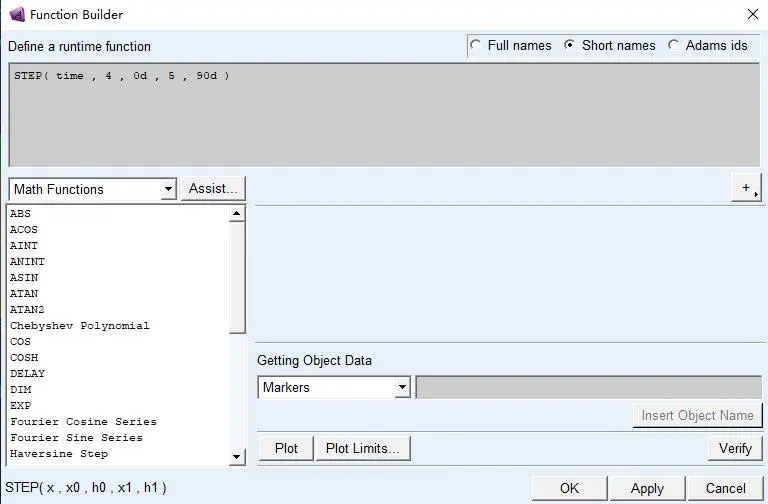 图7 关节4驱动函数 3.2求解设置 设置求解时间5s,求解步长300步,如图8所示,点击开始运行进行仿真。 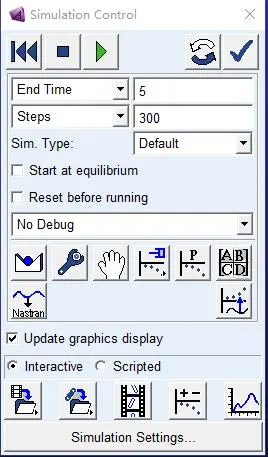 图8 求解设置 4.后处理 4.1仿真动画 仿真结束之后便可以查看其运动动画,如图9所示。 图9运动动画 4.2查看结果 图10为关节1扭矩值,图11为关节2扭矩值,图12为关节3扭矩值,图13为关节4扭矩值。 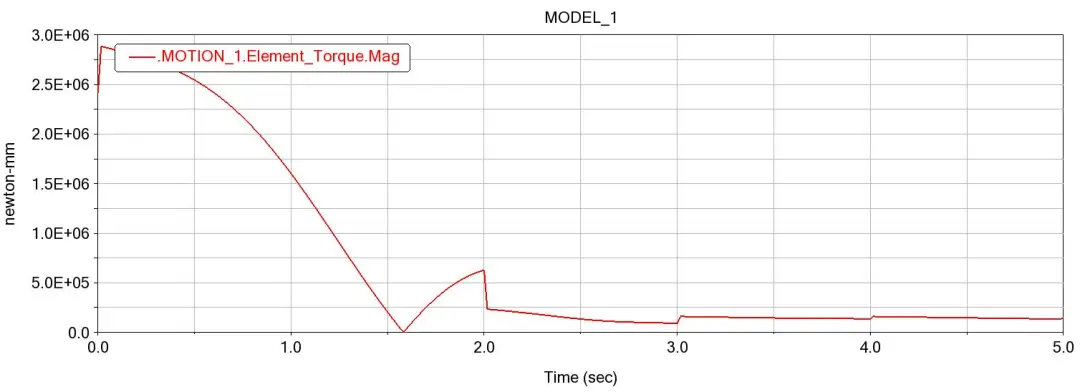 图10 关节1扭矩值 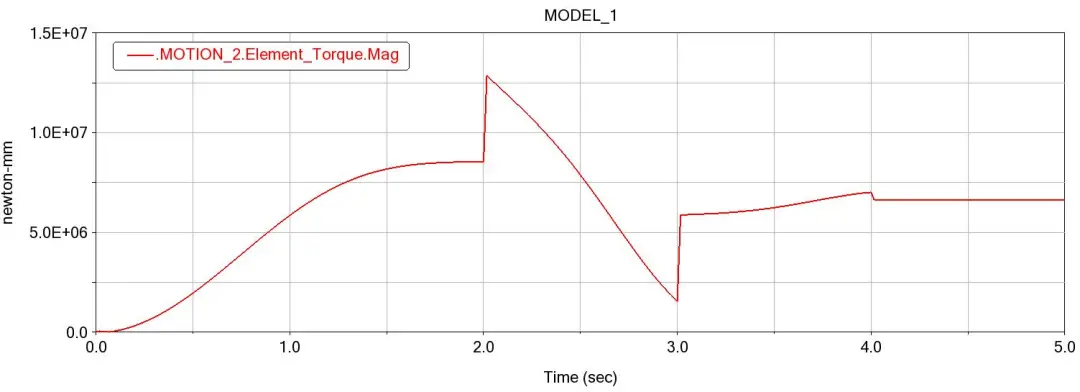 图11 关节2扭矩值 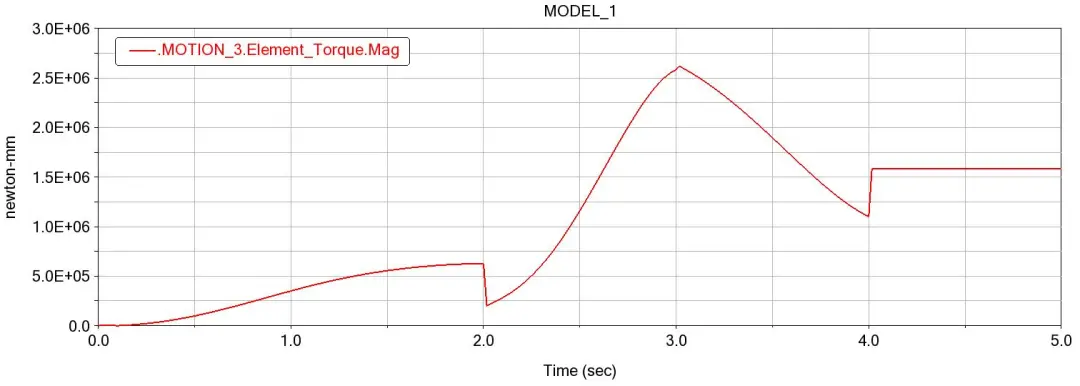 图12 关节3扭矩值 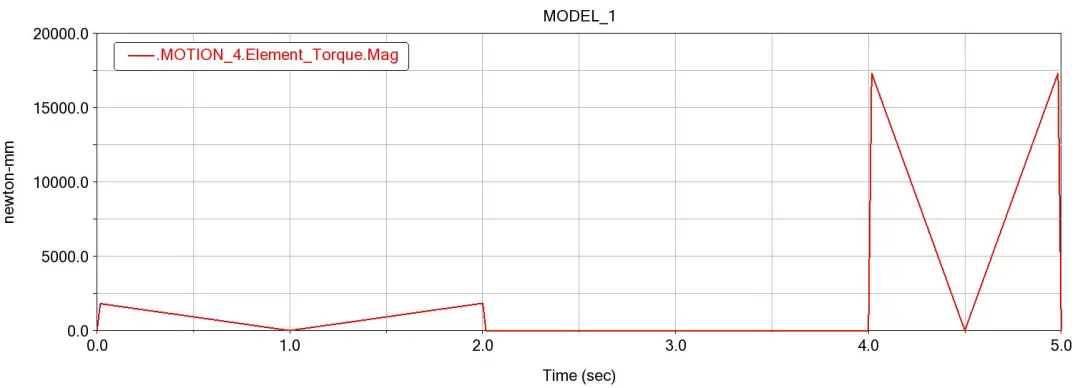 图13 关节4扭矩值 |

 /1
/1 
 |手机版|免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 )
|手机版|免责声明|本站介绍|工控课堂
( 沪ICP备20008691号-1 )
GMT+8, 2025-12-22 21:09 , Processed in 0.241247 second(s), 23 queries .
Powered by Discuz! X3.5
© 2001-2025 Discuz! Team.